Lecture 6 Image Stitching¶
Image Warping¶
Info
- Image filtering changes intensity of image.
- Image warping (翘曲) changes shape of image.
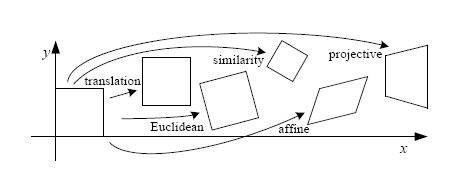
2D Transformations¶
Affine Transformations 仿射变换¶
For these equations, the degree of freedom (自由度) is \(6\), so we need at least \(6\) equations, which is \(3\) pairs of points, to solve out \(a, b, c, d, e, f\).
Projective Transformation (Homography) 单应变换¶
By convention, we have a constraint of one of the two options below:
- The vector norm (向量范数) \(||(h_{00}, h_{01}, \dots, h_{22})^T||\) is \(1\).
- \(h_{22} = 1\).
Consider the constraint above, for these equation, the degree of freedom is 8, so we need at least \(8\) equations, namely \(4\) pairs of points, to solve out \(h_{ij}\).
Summary of Different Transformations¶
Implementation¶
For convenience and maneuverability, we need a function that implies the general warping instead of different warping functions at different pixels.
Forward Warping (Not so good)¶
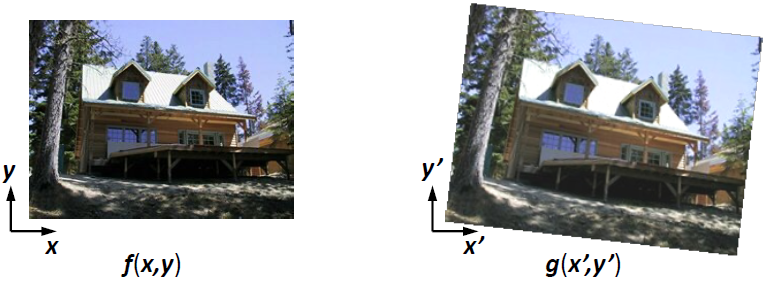
Suppose that an image function \(f:(x, y) \rightarrow (r, g, b)\) transforms with \(T:(x, y) \rightarrow (x', y')\) to a new image function \(g:(x', y') \rightarrow (r, g, b)\).
If the transformed pixed lands inside the pixels
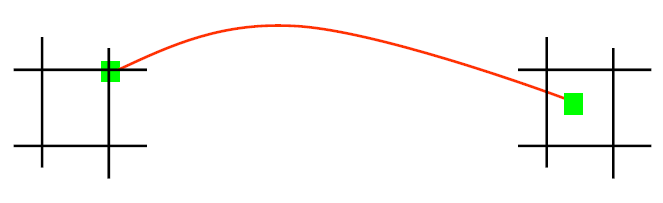
Problem It's quite complicated to solve it.
Inverse Warping¶
Why not consider inversely?
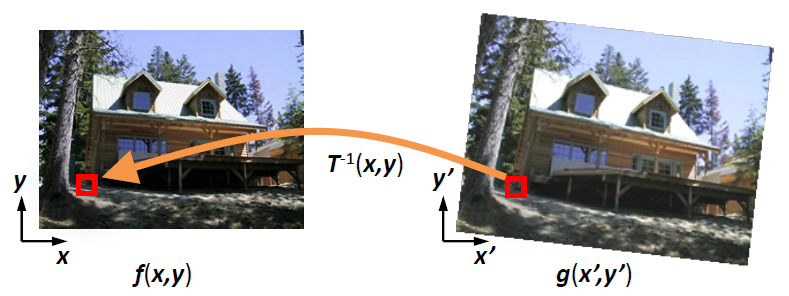
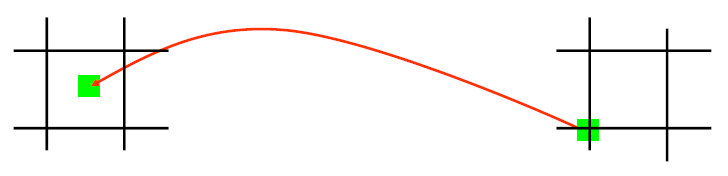
Image Stitching¶
Image Matching¶
By image matching we can obtain the matching points. Each pair of matching points can provide a matrix multiplication of the form shown above.
Find \(T\) for Image Wraping¶
Affine Transformations¶
For each matching,
The matrix form is
For \(n\) matchs, we have the following equations,
namely,
Note
Although \(3\) pairs are the least number to solve out \(a, b, c, d, e, f\), there may be some linear dependent equations, which leads to a nonsingular matrix and degenerates the case that there is no unique solution.
Thus, in order to get the value of \(a, b, c, d, e, f\), the most used method is sampling more points and calculate by MSE, namely determining \(t\) to minimize \(||\mathbf{A} \mathbf{t} - \mathbf{b}||\).
Method of Least Square
Projective Transformations¶
Similarly, for each matching,
The matrix form is
For \(n\) matchs, we have the following equations,
namely,
Similarly, we need to minimize \(||\mathbf{Ah - 0}|| = \mathbf{||Ah||}\).
For contraint: \(||\mathbf{h}|| = 1\)
If we use the contraint \(||\mathbf{h}|| = 1\), we only need to determine the direction of \(\mathbf{h}\), denoted by \(\mathbf{\hat h}\).
Mathematically, we can prove that \(\mathbf{\hat h}\) is the corresponding eigenvector of the minimum eigenvalue \(\mathbf{A^{T}A}\).
Robustness¶
Outliers
Image matching is not perfect, and there may be some wrong matching points to be outlier (孤立点).
Solution: RANSAC
- Each time randomly select \(s\) sets of matching points.
- Calculate the transform matrix \(T\) by the selected matching points.
- Among all matching points, count the number of inliers that approximately fit the transformation \(T\) in a range of error as its score.
- Repeat \(N\) times and then select the transformation \(T_0\) that has the maximum score.
- (Better Step) For all matching points that approximately fit the transformation \(T_0\), calculate an average transform matrix \(T\).
Summary¶
How to make image stitching?
- Input Images.
- Feature Matching.
- Compute transformation matrices \(T\) with RANSAC.
- Warp image 2 to image 1.
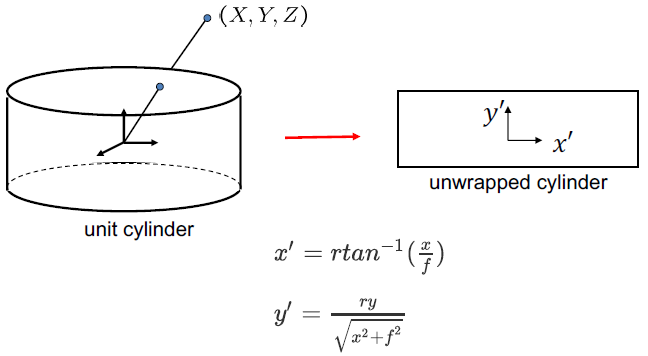
Extension: Panaroma and Cylindrical Projection
Problem: Drift
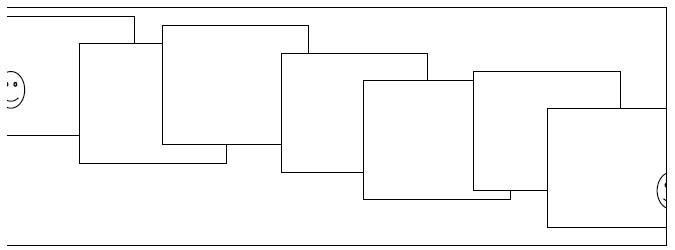
Solution
- Small vertical errors accumulate over time.
- Apply correction s.t. the sum of drift is 0.
Namely reduce the up and down shake when capturing panoroma.
创建日期: 2022.11.10 01:04:43 CST